
Designing Technomadic Systems – Dr Dobb’s Journal
This was the most substantial published Microship system architecture discussion, and still, decades later, reflects the basic design concepts underlying my machines. Although the hardware implementation is completely different, the model is the same: distribute low-power networked nodes throughout the environment and provide a means for anything to talk to anything (even cases not anticipated at design-time). The Microship never reached escape velocity, but the system described here worked beautifully… the lesson being, of course, that one should build the physical substrate before getting locked into a configuration of silicon! NOTE: In early 2016, I posted a collection of photos, showing details of the machines described in this article.
(It is worth noting in 2020 that the networking side of this would now be more effectively done with N2K and Signal K, with Raspberry Pi embedded systems, a browser front end, and no serial crossbar!)
by Steven K. Roberts
Dr. Dobbs Journal
June, 1998
(written Jan-Feb, 1998)
My original motive was simple enough. Horrified by a view of the American Dream from the curtained windows of a three-bedroom ranch in suburbia, doing things I didn’t enjoy anymore to pay for things I really didn’t want, I hit System Reset. Six months later, in the fall of 1983, I put my house on the market and moved to a recumbent bicycle — I was a 30-year-old technomad heading across America with a primitive laptop, solar panel, and xnet connection.
The miles passed by the thousands, the adventures yielding a lifetime of memories, romances, and bizarre discoveries. Twice over the subsequent eight years, the seductive allure of technology inspired a complete system redesign, culminating in “Behemoth.” This silicon-encrusted unix-cycle rolled out of a donated lab at Sun Microsystems in 1991 and lumbered down the highway with a Qualcomm satellite link to the Internet, a killer CD stereo, console Macintosh with handlebar chord keyboard and ultrasonic head mouse, PC with helmet-mounted display, repackaged SPARC with color LCD, 72 watts of solar panels, 105 speeds, robust ham radio station, audio/serial routing network, helmet cooling system, and full bicycle touring load. The whole rig totalled 580 pounds, not including a sweaty bio-engine.
My next technomadic move was to water, and here I am, deep into the fabrication of twin Microships — pedal/solar/sail canoe-based trimarans with enough embedded systems in their pressurized consoles to make Behemoth look downright primitive.

Microship Overview
The Microship design concept is optimized for open-ended coastal and inland travel without dependence on marinas or other shore facilities. These matching boatlets (currently under construction in our Camano Island, Washington, laboratory) are folding multihulls with roller-furling freestanding sails, deployable recumbent pedal-drive units, and 480 watts of folding solar panels driving retractable thrusters. Each boat (one for me, and the other for my partner Lisa) is capable of deploying lightweight wheels and being manually hauled out or launched without needing trailer and tow vehicle. They carry basic camping-scale life-support resources, including water filtration and desalinization, but we assume ready availability of shore facilities since the on-board stores inventory is small. (Our travel plans are primarily coastal and inland waterways, beginning with 12-15,000 miles in North America, then hitchhiking with the boats to Europe.)
Despite severe space and weight constraints, the Microships carry an extensive network of electronic systems, as well as pressurized packaging to keep them alive in a corrosive environment (a nontrivial problem in itself). As with Behemoth, all systems can be loosely grouped into two overlapping categories — infrastructure and applications.
At the infrastructure level, the system has to deal with power management and distribution, thruster control, routing of audio/video/serial channels on demand, ship security, internal performance tracking and diagnostics, console pressure and temperature monitoring, dynamic network configuration (including remote wireless control panels), and so on. In short, this includes all the low-level tools that keep the boats working, provide access to resources, and are always on and must therefore use power as efficiently as possible. In this category, every milliwatt is dear.
The applications layer includes obvious nautical systems, such as navigation and communication, along with digital-video production and camera management, environmental data collection with hourly posting of telemetry blocks, Internet access, ham radio, manpack tracking, the whole suite of PDA and productivity tools accessible while sailing or off-boat, and ongoing software development.
It became obvious early in the development of the Microship system that some unique internal networking challenges were present. These included:
- Random software-controlled interconnection of analog and serial channels.
- Distribution of independent control resources across a low-level network to simplify development and minimize power drain.
- Integration of two autonomous boats into an apparent single system.
- Wired local and wireless remote graphic front end access via off-the-shelf PDAs.
Grand Central Station
One of the nastiest and most troublesome problems facing this design was the sheer number of hardware devices that have to interact. I’m not talking bus-compliant systems speaking a standard data format here. I mean cellphones, marine radios, video cameras, sensors spewing NMEA datastreams, frame grabbers, dedicated control interfaces andtranslators, and the like. From my bike experience, I know that any “complete set” of anticipated interconnects will become obsolete the first time a seductive new gadget arrives. (By the end of its era in 1988, the Winnebiko II was a study in reassigned console switches and multiple layers of annotation scrawled upon already poor documentation.)

For Behemoth, we developed an audio crossbar around the Mitel 8816 microcontroller, vastly simplifying those spur-of-the moment connections that are irresistibly associated with having lots of devices. It took only a few lines of Forth, for example, to respond to a latitude-longitude change without the right password by dialing 911 on the cellular phone and having the speech synthesizer intone, “I am a bicycle and I am being stolen. My present coordinates are…”

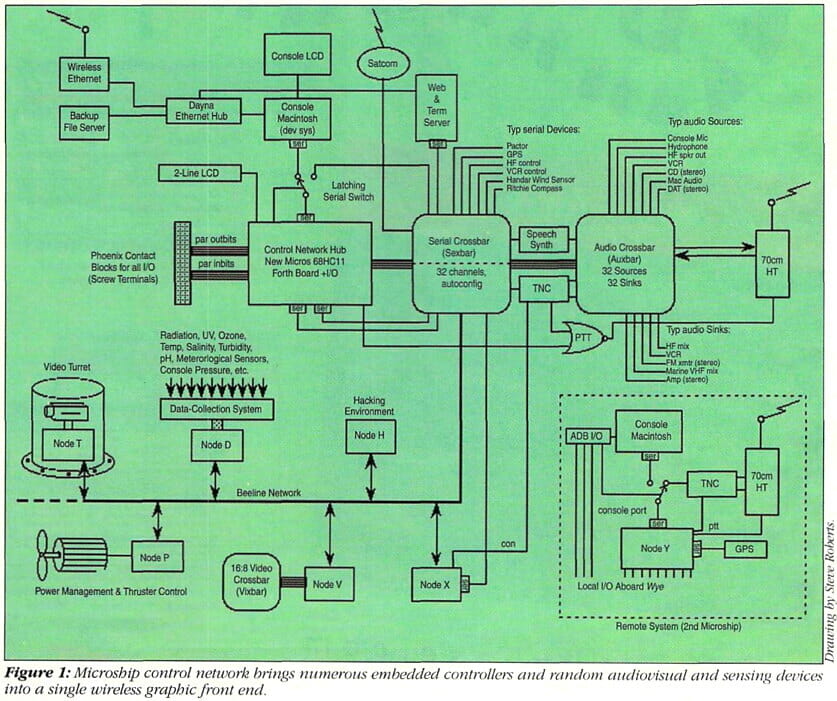
This sold me on the crossbar architecture for like-flavored signal paths. Consequently, the “Grand Central Station” region of the Microship system (see Figure 2a), includes three crossbars (a cabling-intensive zone in the console with 244 connectors):
- The audio crossbar (Auxbar) allows up to eight simultaneous connections among any of 32 sources and 32 destinations. At the hardware level, it’s a stack of two boards bristling with gold-plated RCA jacks, so all we have to do to add an audio device is run a cable and add a line to a table to allow reference by name. Lisa’s boat joins the network via a short range stereo full-duplex transceiver for quality audio, and a 70-cm ham-radio link for voice-grade exchanges — devices that are, of course, merely addresses on the Auxbar. At Lisa’s end, a miniature version of the same design allows the addition of multiple devices as well.
- The video crossbar (Vixbar) is similar, but optimized for higher-bandwidth signals and the need to channel switch during retrace intervals to prevent glitches. The system can handle eight simultaneous links among any of 16 sources and eight sinks, and, since it is less likely to be on call 24 hours a day, is supported by a dedicated Forth node and software-controlled power switch. This network is also expanded to the other boat via a video transceiver, since Lisa runs a Draco Casablanca video-editing system and needs to select camera channels on the fly. Like audio, this system appears as an array of RCA jacks and is trivial to expand or edit. One-line commands make or break any link, add a receiver to an existing connection, or clear all of them.
- The serial crossbar (Sexbar) provides up to four simultaneous bidirectional connections among any of 32 serial channels — 28 of which appear as a dense 4X7 array of DB-9 connectors pop-riveted together. This one is particularly amusing, since it also has to solve the annoying problem of RS-232 “polarity,” those eternally incorrect pins 2 and 3. The code in the Sexbar controller, whenever asked to establish a connection, first zips through the involved pins of both channels, connects them one at a time to a window comparator, sees who’s receiving and who’s transmitting, then assembles a virtual straight cable or a virtual null modem cable as needed. The process is so quick that we often link serial gadgets together just for the fun of it. (That’s a statement I haven’t been able to make since about 1973 when the process of making machines communicate was still intrinsically astonishing and UAR/Ts were radical new alternatives to doing it with shift registers and control logic.)

I occasionally take flak in these Internet-savvy days for using such primitive networking tools as vanilla serial channels loping along at a poky 9600 baud via hardware-intensive crossbar. Why not just give everything a TCP/IP stack and do it right? Well, if the involved devices were all “real computers” that would be sensible, but most of the serial widgets we’re using are small, low-power, dedicated controllers — even PIC processors acting as translators between RS-232 and proprietary protocols like Sony LANC and Dallas MicroLAN. Sticking them all on Ethernet would be power-hungry overkill, in most cases adding far more communications hardware overhead than the devices themselves!
Finally, the power-control system deserves a comment here, even though it’s not a network, per se. In keeping with the spirit of maximum flexibility, all devices that are even remotely power hungry are hanging on solid-state relays, in turn wired to Phoenix Contact blocks that carry a few dozen bits of parallel I/O attached to the Hub processor. It is a trivial process (running one wire) to add a power-control channel with its own status LED, fuse, and pair of switched screw terminals; it takes just another one-line command to turn anything on either boat on or off.
With few exceptions, all random pieces of communication, entertainment, data collection, security, and control hardware appear to the Forth Hub as nothing more than some subset of audio, video, serial, and power channel names.
A Multidrop Network of Multitasking Nodes
The number of autonomous applications on the boats is enough justification for a distributed collection of microcontrollers. Although one PC could certainly do everything with most of its clock cycles lying fallow and its cache tied behind its back, we’d gobble up precious amps while doing nothing but monitoring a few security sensor bits at anchor. From a power-management perspective, as well as development simplicity, the sensible approach is to deploy microcontrollers as needed.
If I were beginning the fabrication of this control network today, with almost all nodes in a single enclosure, I might take advantage of the completed Sexbar and tie the console ports of our New Micros 68HC11 boards to numbered channels, then let the Hub make and break links to its auxiliary port during every node scan. But when we started back in 1994, the assumption was a much larger boat with a dozen nodes in multiple enclosures distributed along 30-50 feet of cable, so a multidrop network was a more sensible solution. Now, with all the code well developed, integrated with the multitasker, and baked into EEPROM, there’s no way we’re changing — even if it does seem slightly redundant to have both multidrop and crossbar networks attached to the same little board! Besides, for most applications the multidrop is more sensible — it takes far less hardware.

New Micros developed its family of HC11 boards (Forth in ROM) with a clever option — RS-232 or RS-485 console ports. The latter, with software-controlled line driver, is optimized for building a multidrop network in which the Hub always transmits to all nodes on one pair, with only one node at a time allowed to transmit on the other. There are various ways to go about this — New Micros offers a clever piece of code with their boards called “Easy-A,” which uses Control-A as a switch character to get all the nodes’ attention, then follows that with a device address — the selected node then turns on its driver and the others continue whatever they were doing.
This and the corresponding tasker were in early development when we started the Microship project, but we were fortunate to engage the services of Forth wizard Bill Muench (author of eForth), who wrote the “Beeline” multidrop protocol code we use today. This uses an obscure feature of the HC11 to interrupt all nodes when the high bit is set, whereupon they all check the rest of the character to see who’s the lucky one. (This “address-mark wake-up,” normally uses a ninth bit, but we have it set to the eighth.) Though this uses nonprinting characters and is thus less convenient during development from an ASCII terminal than Easy-A, it’s tight and simple — we just set the high bit of the Node ID character (“T” for turret, and so on), squirt it down the line, and the link is made. A status LED on the selected node lights up for visual confirmation of network activity. Breaking all links, of course, is done by sending a nonsense character with bit 7 high.
In operation, the Hub (see Figure 2(b)), spends much of its time doing a nodescan, which updates an internal variable table every 15 seconds or so by sequentially selecting and querying all the nodes. In addition to collecting all variables that are needed by front-end displays and status monitoring, it also checks a watchdog character for every node — allowing a display on a small local LCD of the whole network’s status as well as automatic restart of a crashed board.
None of this would work well without a multitasker, which allows the processors to handle all this ongoing communication without complicating the applications themselves. Nodes are collecting data, calculating statistics, controlling hardware, keeping an eye on internal sensors, and so on, all while the Hub makes the rounds, pretending to be a console and issuing simple Forth commands that request variables or execute commands relayed from one of the graphic front-end systems or the database engine in the server.
The nodes are built and coded as stand-alone projects, then dropped on the network as needed. The thruster controller, for example, power-cycles Hall-effect current sensors every few seconds to take a snapshot of all system loads and the instantaneous power available from the 480-watt solar array. This is folded into a running average that determines the available thruster power budget implemented as a “smart potentiometer” hacked into the Minn-Kota PWM controller. The throttle is then assigned that operating range — with a pushbutton override if emergency conditions (looming freighter, getting blown onto the rocks, whatever) justify pulling thruster power from the single Group 27 deep-cycle battery. (By the way, our available 32 amps should, under perfect solar conditions, yield 42 pounds of thrust for a cruising speed of roughly five knots without the aid of pedal or sail.)
Other nodes take care of video turret positioning and camera control, data collection, video crossbar switching, security, and so on — all relatively straightforward applications that operate autonomously with respect to the rest of the network, interacting only at the level of console commands and condition-reporting variables. The resulting network is simple and robust, with minimal single-point failure potential.
Packnet: Extending the Network to Wireless
Back when this project began, the network was straightforward: one boat, one multidrop chain of nodes, one controller Hub, and a graphic console implemented in HyperCard. As the mission profile evolved, however, we sold the yacht and began construction of twin micro-trimarans, autonomous yet linked human-scale vessels. This immediately introduced a nasty problem, not to mention the issue of scalability.

Each boat needs local control and monitoring, yet from the GUI and remote front-end perspective I want to see it all in one homogenous context. We need to wirelessly link the boats, but not at the LAN level — that would reintroduce a power problem by requiring 100 percent duty cycle of the Ethernet hardware and computers smart enough to use it. Speed in the control network is not critical, since time-sensitive tasks have their own processors.
The solution, known as “Packnet,” not only takes care of boat-to-boat networking, but encompasses our backpacks as well: A mixed-mode packet and voice network on the 70-cm ham band. The Terminal Node Controllers (TNCs) run at a blistering 1200 baud, but draw so little power that they can be left on permanently, as can the nodes that own them and the attached radios (hacked handheld transceivers). This network does not carry anything that can be classed as business traffic. The applications level that may include manuscripts and e-mail is entirely under FCC Part 15.
Node X is a Forth 68HC11 board like all the rest, but has a simple job that involves chatting with the other boat and both backpacks, shuttling Forth commands to the former, and collecting telemetry and GPS coordinates from all three. Normally linked to the TNC, it can also accept and verify a remote console login, then tell the Hub to route the authorized user via serial crossbar to take over the Hub’s own console (or any other serial channel, including a port on the server).
Under normal conditions, Node X asynchronously (relative to the Hub’s nodescan) passes queued commands to Node Y, while also collecting status and watchdog variables. Node Y, on Lisa’s boat, is analogous to the Hub on mine — it runs the local show, with connections to other local nodes such as her thruster controller and power management.
One of the most amusing applications of all this is the tracking system, which allows either boat or either pack to determine range and bearing to any other. Between the boats, it’s simple: Lisa’s GPS hands continuous latitude-longitude data to Node Y via a small local serial crossbar, and the NMEA sentence is parsed into convenient variables passed to Node X (hence, the Hub) on every scan. If I want to know where she is, a simple inquiry invokes great circle calculations and displays or speaks the result (or shows her absolute location overlaid on the navigation chart). But the packs need similar functionality with a lot less available hardware.
The solution is a board from TAPR (Tucson Amateur Packet Radio Association, called “MIC-E.” Placed between a microphone and a radio, and connected to the serial output of a GPS, this device tails all voice transmissions with a 32-byte, 300-ms burst carrying latitude-longitude and basic telemetry/flag data — and it can be set to transmit at intervals if there’s no voice traffic.
This completes the picture: While wandering around town, Lisa can find me or her boat by simply pushing a single button, thereby triggering a status request transmission that tells the Hub to compute range and bearing from the most recent GPS fixes from her pack and the other units. The speech synthesizer then powers up, links to the same radio via audio crossbar, and speaks the data she needs: “Your boat is 1.2 miles away on a bearing of 124 degrees…”

Console Browsers and the High-Level Network
Once all these systems are chatting away in ASCII, we really don’t want to look at them. Two years from now, floating down the Tombigbee River, I don’t want to have to recall the format of the turret’s SCAN and ZOOM commands to make the camera sweep slowly across the magnolia-draped waterfront of an antebellum plantation, then zoom slowly onto a sagging dock. But how do you write a GUI on an eight-bitter with 64K of address space and no disk?
Obviously, you don’t. Let the little guys do what they do well, and add layers as needed to do the sexy stuff, which, after all, is consistent with our power-miser philosophy (when we’re asleep, we need vigilant nodes, not animated GIFs).
The first implementation was easy: HyperCard on the console Macintosh. A crossbar front end that took two students two quarters to do badly in C (and a fat listing it was) took me an afternoon in HyperTalk — and it was prettier and much more modifiable. However, I don’t want to require that the Mac be on, or constantly switch between running applications to uncover the window that controls the boat. What we needed was a permanent, low-power graphic front end — preferably one that’s portable enough to use via wireless from a pack on shore.

The second implementation was stunning in its beauty and integration — and written in NewtonScript. With Digital Ocean’s Tarpon wireless Newton (no longer available) and a wired unit for the helm, along with software wizardry from Chris Burmester and Allpen’s Erik Browne, we quickly evolved a clean custom layered control console that allowed pen control (via pen-base-T?) over the entire system; see Figure 3. In the turret view shown, touching any point on the circle around the boat moves the selected camera to that angle. Drawing an arc shades the selected region and scans the camera at whatever speed is selected by the slider. Other views control VCR or ham radio, display bargraphs of environmental sensors, and so on — one even lets us create macros (or presets) of Forth commands, name them, and select from a pick list. All tools simply send ASCII strings in response to touches, or convert received variables into graphs and icons.
This was nearly an optimal solution to the user interface of our control network, though it does involve one slight problem — custom code. Although the Newton is robust and power efficient, and although NewtonScript has the distinction of being the most elegant language I’ve ever used, the current uncertain fate of the platform (alas, Apple has announced it will no longer manufacture the PDA) may imply a shortage of developers and a future scarcity of upgrade paths. So how do we keep this same level of generality while achieving complete platform independence?

The solution was under our noses all along! We are now building a web server and command engine that hangs on the serial crossbar so we can deploy browsers on whatever platforms are handy. At the moment, we are evaluating 3Com/US Robotics PalmPilot running PPP via wireless modems to the boat — Symbol Technologies is introducing a waterproof version for industrial data-collection applications, and there are already a couple of browsers out there…and Java is due soon. Not only does this let us have instant Telnet remotes while building the entire front end in HTML and Java, but it also opens up the application to a near-infinite range of volunteer developers, lets us upgrade hardware as product evolution turns today’s magic into tomorrow’s garage sale item, and lets us present all system documentation and online databases on the same handheld or console-mounted screens.
We do have a packaging problem to solve. A local control PalmPilot mounted in the console of a canoe-scale trimaran is going to get wet, and the normal sealing techniques don’t work well with a pen interface (maybe someone can write a mouse driver for us), but with our newfound platform independence, we could use another product in that role. But the architecture is simple: A low-power PC/104 embedded 486 PC running Linux, terminal server, and Apache sits atop the Hub, maintains the complete system state, serves code reloads when watchdogs detect failed nodes, and handles connections from the various wired and wireless browsers in our little nomadic family as we engage in pier-to-pier networking and knock back tankards of shoal draft after a hard day’s solar pedalsailing.
And that, after all, is what it’s all about — the bottom line is fun.
Resources
You may download a 7.9-megabyte Searchable PDF of this article:
Designing Technomadic Systems
You must be logged in to post a comment.